MOST in Driver Assistance
Advanced Driver Assistance Systems (ADAS) are on their way to becoming an integral part of the vehicle – with interfaces to many different clusters of electric/electronic systems in the car. Comparable to the human body, numerous functions have to be implemented and networked: sensors – for example radar, cameras or ultra sonic – processing units and actuators like steering, brakes, ESP and airbag. Taking into account the complexity of the use cases and the different vehicle areas that have to exchange information, it is obvious that an adequate network infrastructure is of essential importance for the efficiency of the system. From a functional point of view, driver assistance systems have started to enlarge the functional range of classical infotainment systems.
As shown in figure 1 “Evolution of E/E Architecture”, the driver assistance domain will become an integral part of the E/E ecosystem. Driver assistance systems and infotainment will be growing together in the future.

Fig.1: Evolution of E/E Architecture (Source: SMSC Europe GmbH)
Typical emerging driver assistance applications such as
- Collision Warning
- Traffic Sign Monitor
- Lane Departure Warning
- Advanced Lane Guidance
- Pedestrian Warning
- Night Vision
- Adaptive Cruise Control (ACC)
- Pre-Crash Warning
have in common that they will involve the driver as the supervisor. The driver will be in the outer loop of each such cascaded control structure.
As a consequence, the driver’s attention – a limited and the most valuable resource – needs to be shared additionally. This will lead to many challenges in the future with respect to usability, etc. But decisive in this context is the impact on the automotive infrastructure level, especially the network level.
When driver assistance systems and the infotainment system need to work together, and both need to build a seamless system, this reflects to special requirements at the network level.
These are characterized by
- High integration of multi-channel network
- Hard real-time, determinism and low latency
- Flexible topology
- High bandwidth
- Safety aspects
- Robustness and maturity.
In the next section it will be shown that a multi-channel network approach with inherent synchronicity will be the first choice.
Additional advantages such as maturity, cost efficiency and flexible topology are further arguments for MOST Technology as it fits best from a system solution perspective.
Multi-channel approach
Driver assistance systems typically have to deal with a variety of sensor data. In order to cope with the complexity, you often find a hierarchical approach with different abstraction levels and timing constraints. On the lower level there is a high amount of raw data, where high bandwidth as well as coherent and fast transmission are required. On the medium level, objects and attributes need to be transported. Finally, on the highest level, interpretation data will flow. A typical mapping to MOST is shown in Fig. 2 MOST Data Transport Mechanisms.

Fig.2: MOST Data Transport Mechanisms
A multi-channel network allows the parallel usage of all services for control data, streaming data and packet data through one network. These services are easily synchronized, if necessary, in a highly deterministic way.
The third generation of the MOST Specification [1] introduces MOST with 150 Mbit/s. MOST150 enables IP data communication, providing the automotive-ready Ethernet channel according to IEEE 802.3 with freely configurable bandwidth from 0 to nearly 150 Mbit/s. In this way, MOST is open to a broad variety of IP protocol based applications, including the seamless integration of wireless mobile devices or car-to-car and car-to-infrastructure communication.
The MOST Framework, with its function block concept, comprises a clear application programming interface. It is able to standardize both interfaces between infotainment applications and sensor interfaces such as cameras in driver assistance applications.
Hard real-time and low latency requirements
Driver assistance systems in a hierarchical approach with sensor fusion applications lead to hard real-time and low latency requirements. Severe jitter restrictions need to be met over an automotive environment temperature range from -40°C to 95°C (or even 105°C).
To this purpose, the MOST system concept is based on inherent synchronicity on the physical layer level. Clear distinction between transfer jitter (relevant on the system level) and alignment jitter (only relevant on the single link level) leads to a robust system design. The specification limits are testable and can be checked during compliance verification.
Flexible Topology
The flexibility of the MOST network has already been proven: differing topologies such as star, chain and tree are equally possible, as are diverse physical layers: polymer optical fiber (POF), coax based electric physical layers as well as shielded or unshielded, twisted copper cables (STP/UTP). The MOST150 Specification Rev. 1.0 for the electric physical layer for MOST150 via coax cable has recently been released. This standard extends the existing optical physical layer for MOST150 in the infotainment domain and opens up new possibilities into vehicle domains like driver assistance, as it allows bi-directional communication and power supply across a single cable. Both physical layers are fully compatible.
High Bandwidth
MOST is designed as a synchronous network system solution with high bandwidth at nearly no overhead for administrative communication.
The management of synchronous and isochronous streaming connections allows for an appropriate allocation of resources and thus provides access to quality of service (QoS) communication. Concerning the isochronous channel, QoS IP communication is provided as well.
The bandwidth requirements will still be increasing. In addition to USB 3.0 and display link application in driver assistance there will be a need for uncompressed video transmission and sensor fusion.
MOST is committed to a clear definition of a roadmap. MOST Technology is open for future extensions, e.g. considering high bandwidth. The next generation of MOST will enhance the bandwidth into the Gigabit range. This seems to be promising for both optical link and coax links, which are both used today in telecom standards, whereas today´s UTP approach seems to stay in a niche.
Safety aspects
Depending on the grade of safety relevance, in driver assistance systems safety aspects need to be considered. For those applications, potential communication failures such as
– Failure of communication peer
– Unintended message reception
– Message loss
– Re-sequencing
– Message corruption
– Message delay
need to be detected safely [4].
To this purpose, an adequate safety software layer concept can be introduced. The safety layer is added to one or the other application (Fig. 3). The counter measures are, for example
– CRC (cyclic redundancy check)
– Sequence counter
– Message length
– Timeout detection
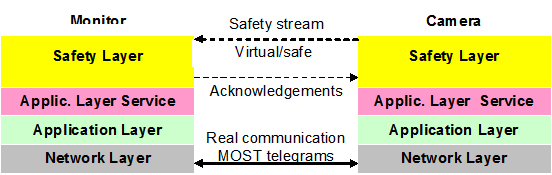
Fig.3: Safety Layer Concept Example
The feasibility of this concept has already been proven by corresponding studies in cooperation with the German TÜV [3]. MOST150 supports the safety layer concept to enable fail-safe application up to SIL level 3 according to IEC 61508 and ASIL C according to ISO 26262 [4].
The latest generation MOST150 already fulfils the requirements to the greatest possible extent. And, as in an infotainment system, the functional system model can be used for internal device communication, so for the application it does not matter whether the communication partner is sitting in the same control unit or connected across the network. Moreover, the network can be mixed with “normal” network nodes without a safety layer.
Robustness and Maturity
Today, MOST Technology is proven as robust in over 115 car models on the road. The latest generation of the MOST Specification incorporates the lessons learned.
For the third generation of MOST, reference implementations [5] have been realized and several OEMs have given their approval as the technology is mature. SOP for cars with MOST150 will be in 2012.
MOST stands for a system solution approach. It proves as cost efficient.
- The inherent synchronicity on the network level lowers the requirements on the component level and saves resources.
- Standardization of MOST provides reuse of the function blocks, which are sets of standardized commands that allow for synchronized message and event flow.
- MOST provides an IP (intellectual property) pool with royalty-free cross-licensing among the members of the MOST Cooperation. It allows for a straightforward, easy grant of license which is based on compliance testing. This model, as well as the technology, is attractive for both premium and volume carmakers.
- Established compliance processes with accredited MOST Compliance Test Houses according to ISO 17025 [6] leads to pre-tested components. In addition, the compliance verification program closes the design feedback loop and thus helps to continuously improve the standard.
Conclusion
This contribution has shown that a flexible multi-channel approach like MOST will provide an overall optimal system solution meeting the requirements of infotainment and driver assistance as they grow together and face higher bandwidth needs.
Applications where the attention of the driver is shared will especially require an appropriate network that supports an easy and seamless integration of infotainment and driver assistance domains. MOST Technology is being developed by automotive series developers and driven by the OEMs. It meets these automotive requirements.
Starting with the new generation – MOST150 – and providing a deliberate roadmap, MOST Technology is resilient and future-proof. It will be prepared for the challenges to come.
Literature:
[1] MOST Specification Rev. 3.0 E2. MOST Cooperation, 2010.
[2] Grzemba, A.: MOST – The Automotive Multimedia Network – From MOST25 to MOST150. Franzis Verlag, Poing, 2011, ISBN 978-3-645-65061-8.
[3] Lisner, J.; Specht, J.: Definitely Safe. Elektronik Automotive. Special Edition March 2010, p. 32-34.
[4] ISO 26262-6:2011 Road vehicles – Functional safety – Part 6: Product development at the software level.
[5] Braun, A. et al.: Validation of the MOST Specification. Hanser Automotive, April 2009.
[6] ISO 17025:2005 General requirements for the competence of testing and calibration laboratories.
About the author:
Dr.-Ing. Wolfgang Bott is the Technical Coordinator of the MOST Cooperation. He also acts as the MOST Compliance Administrator.
 If you enjoyed this article, you will like the following ones: don't miss them by subscribing to :
If you enjoyed this article, you will like the following ones: don't miss them by subscribing to :