Symtavision joins efforts with AUTOSAR modelling tool vendors
The standardization afforded by AUTOSAR and the emergence of associated modelling tools has already contributed significantly to an enormous improvement in productivity from a software development perspective. However, in terms of system integration, answers are needed to key questions such as what is the right dimensioning for ECUs in order to implement the functional range in a reliable and cost-effective way, which resources are consumed by the basic software and which parts could be freed by optimization, what is the best mapping from the functional architecture to the software architecture related to the optimized use of available resources, required reserves and safety requirements? Answering them requires an in-depth understanding and control of the timing and resource usage of the system along with their consistent consideration in the AUTOSAR design process.

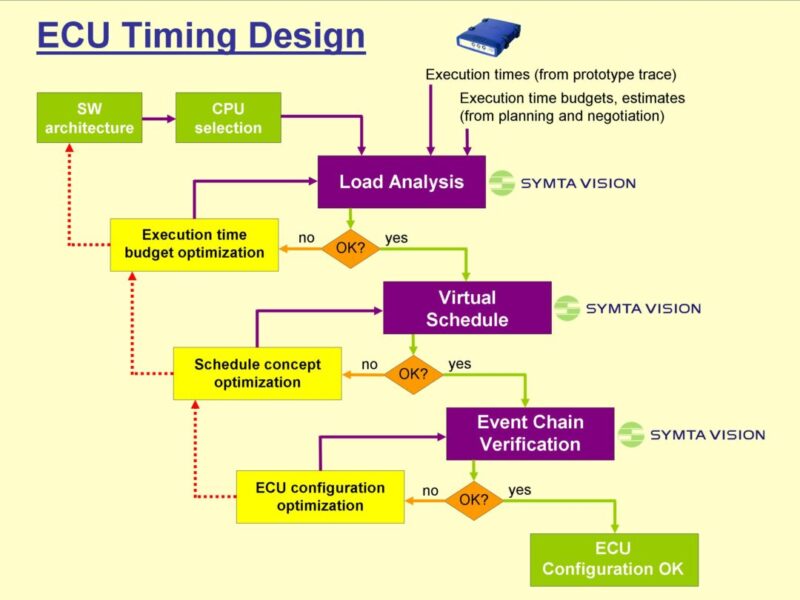
SymTA/S provides engineers with this understanding enabling them to capture all the timing properties along with the existing AUTOSAR meta-model, today with the commonly used AUTOSAR Release 3.2 and in the future with the timing extensions in AUTOSAR 4.0. Its integration with established AUTOSAR modelling tools has enabled timing design and verification techniques to be introduced to all stages of the AUTOSAR development process from initial Load Analysis for execution time budget optimization through to subsequent Virtual Scheduling for concept optimization and final Event Chain Verification for ECU configuration optimization and integration. Tool integration is achieved using both AUTOSAR’s standardized XML file-based configuration exchange and ARTOP Eclipse plug-in of base methods for AUTOSAR tools.
Visit Symtavision at www.symtavision.com
 If you enjoyed this article, you will like the following ones: don't miss them by subscribing to :
If you enjoyed this article, you will like the following ones: don't miss them by subscribing to :