Camera matrix enables three-dimensional vision
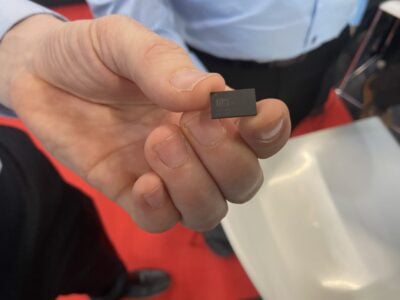
At the presentation of their “half-time milestone”, the consortium partners presented a first prototype of the camera. The camera matrix consists of sixteen individual cameras arranged in a square, which together serve not only as imaging devices, but also as distance meters. The matrix measures about three by three centimeters and was made from a high-resolution full-format sensor with microlenses in front of it. It captures the scene from sixteen slightly offset perspectives to calculate a depth image. A small but efficient processor, embedded in the camera system, allows depth information to be calculated in real time. The captured color and depth data serve as input for downstream applications. Due to its compact design, the camera can also be integrated into small components as a non-contact sensor.
Oliver Wasenmüller, consortium leader and co-initiator of the DAKARA project (“Design and Application of a Compact, Energy-efficient and Configurable Camera Matrix for Spatial Analysis”) explains: “The camera matrix impresses with the advantages of a passive depth sensor combined with a compact design and a high frame rate. The 3D depth images always contain valuable additional information to the color images, which make the application of many algorithms possible in the first place or bring them to a robustness that allows a professional application.
The new system has been extensively tested in two different application scenarios by DAKARA’s industrial partners:
During experiments as a rear-view camera through partner Adasens Automotive GmbH, the system recognized even finer structures such as kerbs or posts during autonomous parking. It detects the vehicle’s environment both spatially and metrically and thus provides much more precise 3D information than conventional ultrasonic sensors today.
Tests at application partners Bosch Rexroth AG and the German AI Research Institute DFKI have shown that workers can be supported in manual assembly processes by intelligent assistance systems. In addition to the depth information of the DAKARA camera matrix, this is due to the intelligent algorithms for manual data acquisition developed by the project partner CanControls GmbH. Using the latest methods of machine learning and the depth information of the DAKARA camera matrix, the hand position in 3D space is determined. This enables an automatic check of the work steps and an intuitive gesture-controlled interaction of the operator with the software system.
By the end of February 2020, the project partners will be working on optimizing the accuracy, performance and robustness of the camera and intensively testing the system in the applications.
DAKARA is funded by the German federal government within the program “Photonik Forschung Deutschland – Digitale Optik” (BMBF). The project volume totals 3.8 million euros. Members of the research consortium are DFKI (Kaiserslautern), Adasens Automotive (Lindau), AMS Sensors (Nuremberg), Bosch Rexroth (Stuttgart= and CanControls (Aachen).
More information: https://www.dfki.de/en/web/
Related articles:
Ultra-compact camera delivers 3D information
 If you enjoyed this article, you will like the following ones: don't miss them by subscribing to :
If you enjoyed this article, you will like the following ones: don't miss them by subscribing to :