Software for autonomous vehicles looks into the future
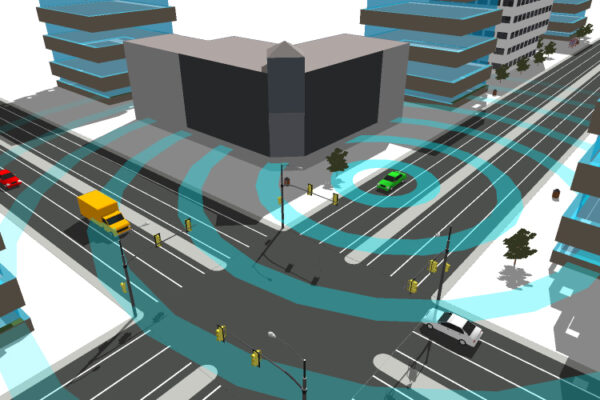
The car approaches an intersection. A vehicle comes out of the crossroads; it is not yet possible to tell whether it is turning right or left. At the same time, a pedestrian runs into the road directly in front of the car, while a cyclist is standing on the other side of the road. A person who already has a routine in road traffic will in most cases be able to correctly assess the movements of other road users. Autonomous vehicles and their software, on the other hand, find it extremely difficult to cope with such situations. This means that accidents are likely – and acceptance of autonomous vehicles is declining.
Together with his team, professor Matthias Althoff, a member of the Munich School of Robotics and Machine Intelligence at the Technical University of Munich (TUM), has developed a software module that permanently analyses and forecasts what happens while driving: The vehicle’s sensor data are recorded and evaluated every millisecond. The software now calculates all theoretically possible movements for each road user – at least as far as they are in accordance with the road traffic regulations. On this basis, the system looks three to six seconds into the future.
Based on these probable scenarios, the system determines various movement options for the vehicle. At the same time, the programme calculates possible emergency manoeuvres with which the vehicle – by accelerating or braking – can be brought to a safe place without endangering others. Only if a trajectory can be travelled without a foreseeable collision and an emergency manoeuvre is possible at the same time, may it be used by the autonomous vehicle.
Such a detailed prognosis of the traffic situation was previously considered too complex and therefore not practicable. The Munich research team has now been able to show not only that real-time data evaluation and simultaneous simulation of the future traffic situation is theoretically possible, but also that it can provide reliable results.
The rapid calculations are made possible by simplified dynamic models. In the so-called accessibility analysis, it is calculated which positions a car or a pedestrian, for example, could take in the future. However, if all the characteristics of the road users are taken into account, the calculation is complex; the research team therefore works with simplified models. These are mathematically easier to capture. For example, the greater freedom of movement allows them to assume more possible positions – which at the same time includes the positions that are expected for real road users.
For the evaluation, the computer scientists created a virtual model based on real data, collected during test drives with an autonomous vehicle. In this way, a test environment was created that reflects everyday traffic scenarios. “With the help of the simulations, we were able to show that the safety module does not lead to any loss of performance in driving behaviour, that the forecast calculations are correct, that accidents are prevented and that the vehicle is demonstrably stopped safely in an emergency,” concludes Althoff.
The new safety software can facilitate the development of autonomous vehicles because it can be combined with all current programs for motion control, the computer scientist emphasises.
The team’s research was funded by BMW’s CAR@TUM project, the Ko-HAF project of the Federal Ministry of Economics and Energy and the German Research Foundation DFG.
More information: https://www.in.tum.de/i06/people/prof-dr-ing-matthias-althoff/
Related articles:
Transponder allows cars to “see” pedestrians
Jointly researching AI for automated driving in cities
Prediction tool reduces traffic stalls
AVL, TU Graz develop adaptive simulation software for automated driving
 If you enjoyed this article, you will like the following ones: don't miss them by subscribing to :
If you enjoyed this article, you will like the following ones: don't miss them by subscribing to :